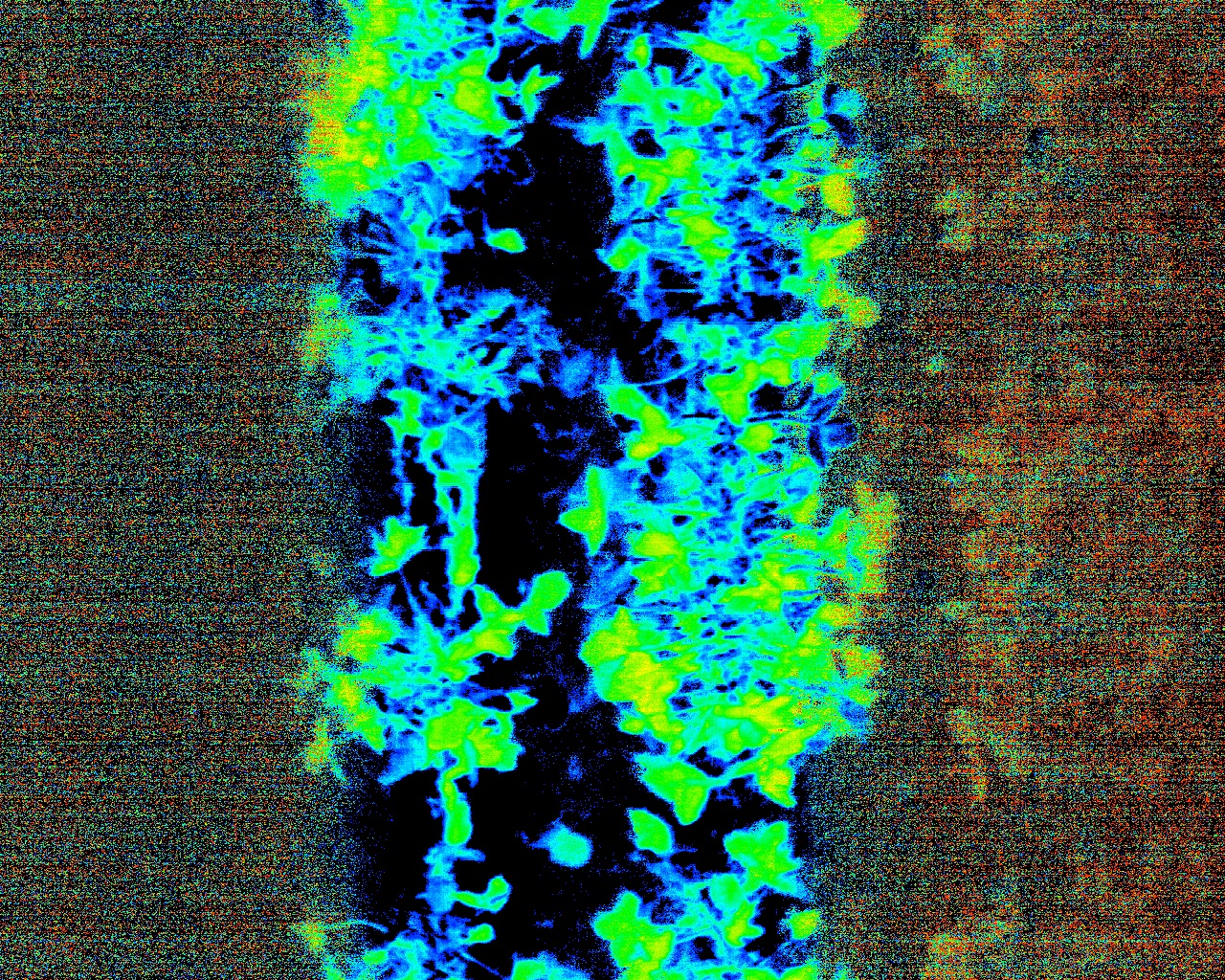
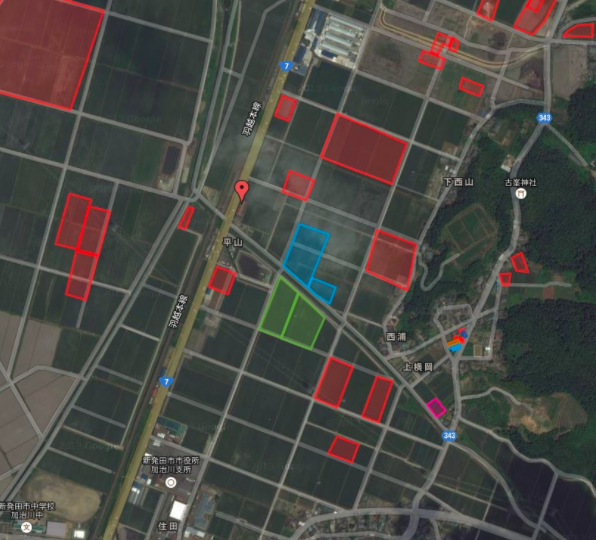
研究内容 ビークルロボット トラクタ、田植機、コンバインなど農機をロボット化する研究をしています。マシンビジョンや測位衛星などを利用して、無人化や自動走行に関する研究を行っています。複数のロボットによる協調作業システムやスマートロボットに関する研究を行っています。日本版GPSである準天頂衛星「みちびき」の高精度測位情報を用いることで、さらなる精度向上も目指しています。 マニュピレータロボット ロボットアームとハンドを持ったマニュピレータロボットの研究です。たとえば重量野菜の収穫などは重労働ですが、この収穫作業をロボット化する研究を行っています。「足」の機能を有するビークルロボットに「腕」と「手」を付与することでロボット農機の機能拡大を目指しています。 スカウティングロボット 自動運転が可能なロボットトラクターによるセンシング技術の研究です。近年では「ハイパースペクトルカメラ」という特殊なカメラを用いた夜間のセンシングやシステムの開発に向けて研究を進めています。 農業情報のデータ化 「気象」や「作業履歴」などの情報を活用して、ベテラン農家の匠の技を誰でも簡単に使えるように目指しています。(農業情報のデータ化) リモートセンシング リアルタイム性と高い空間分解能を必要とするセンシングにはドローンを用いた低層リモートセンシング,広域性を必要とするセンシングには衛星リモートセンシングが有効です。本研究室では衛星リモートセンシングと低層リモートセンシングを研究対象としています。さらに低層画像と衛星画像を融合してGISで一元化することで,シームレスでタイムリーな圃場環境モニタリングシステムの構築を進めています。 電気自動車(EV) 次世代のスマート農業に向け、リユース品の電気自動車バッテリーを用いたビークルの開発を行っています。本研究では「無人化」「知能化」による人手不足の解消、「ゼロエミッション」による持続可能な社会の構築を目指して研究しています。