ICT x Robots for Innovation in 21st Century Agriculture
research
Vehicle Robot
We are conducting research on robotization of agricultural machinery such as tractors, rice transplanters, and combine harvesters.
We are conducting research on unmanned and automated driving using machine vision and positioning satellites. We are conducting research on cooperative work systems using multiple robots and smart robots. We also aim to further improve the accuracy of positioning information by using the Quasi-Zenith Satellite “MICHIBIKI”, which is the Japanese version of GPS.
Manupilator Robot
We are researching a manipulator robot with a robotic arm and hand. Harvesting heavy vegetables, for example, is hard work, and we are researching the robotization of this harvesting work. We aim to expand the functions of robotic farm machines by adding “arms” and “hands” to vehicle robots that have “legs” functions.
Scouting Robot
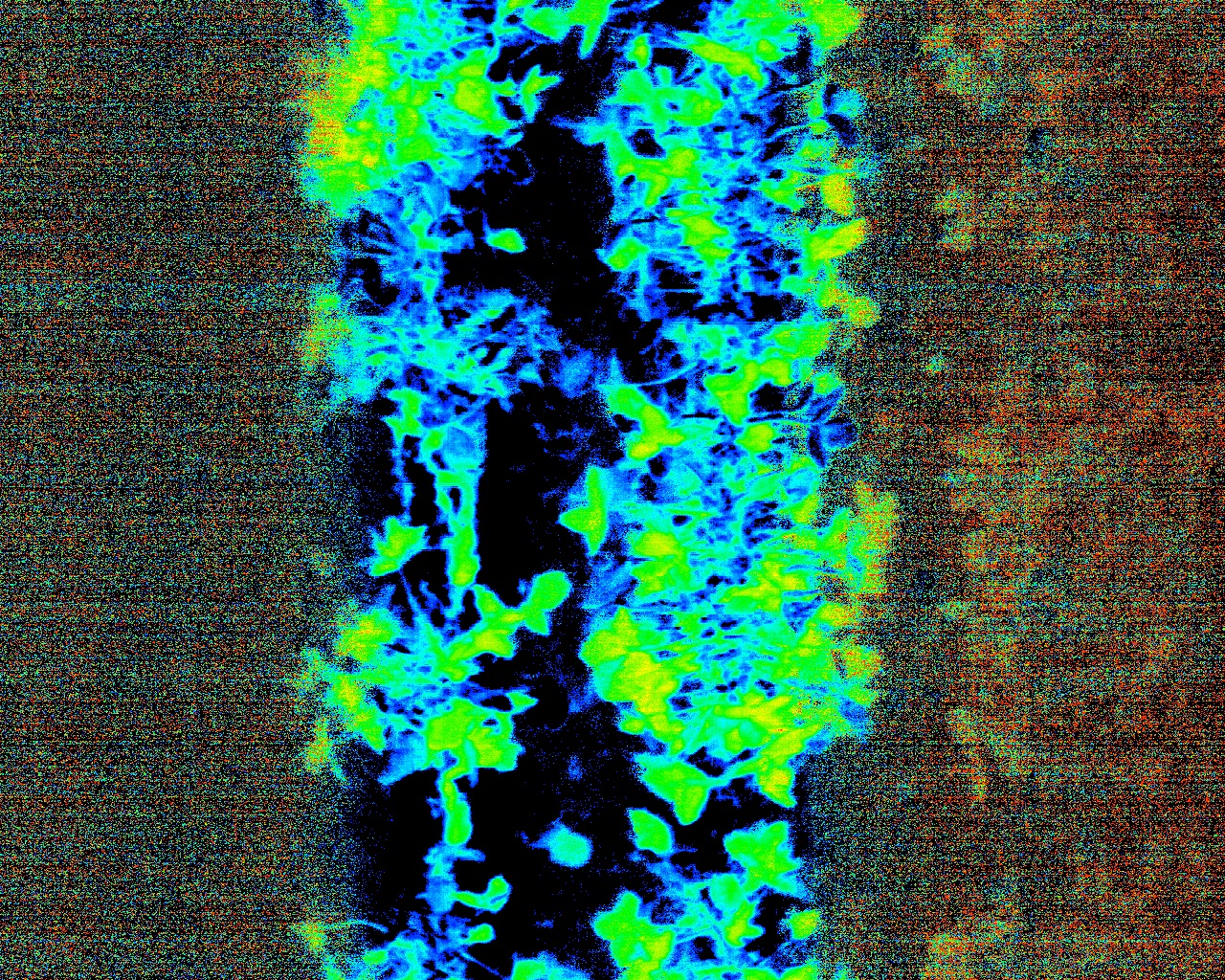
This is a research on sensing technology using a robot tractor capable of automatic operation. In recent years, we have been conducting research to develop nighttime sensing and systems using a special camera called a “hyperspectral camera.
digitalization of agriculture
We aim to make it easy for anyone to use the mastery of veteran farmers by utilizing information such as “weather” and “work history.”
remote sensing
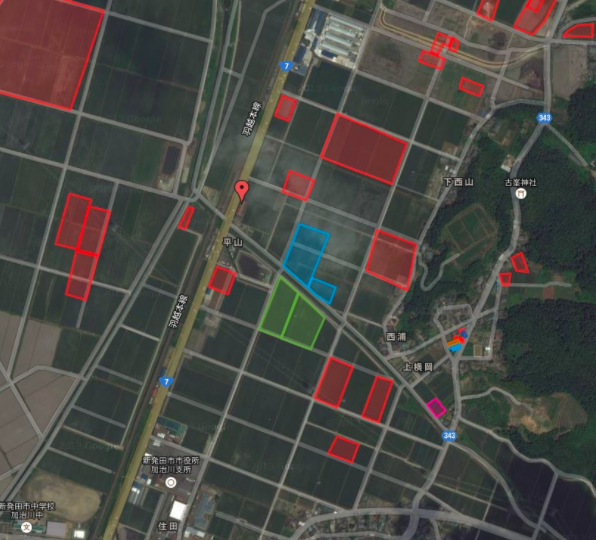
Low-layer remote sensing using drones is effective for sensing that requires real-time performance and high spatial resolution, while satellite remote sensing is effective for sensing that requires wide area coverage. In this laboratory, satellite remote sensing and low-layer remote sensing are the research targets. Furthermore, we are constructing a seamless and timely field environment monitoring system by fusing low-layer and satellite images and integrating them in a GIS.
Electric vehicle
We are developing a vehicle using reusable electric vehicle batteries for next-generation smart agriculture. Our research aims to solve the shortage of manpower through “unmanned” and “intelligent” systems, and to build a sustainable society through “zero emission” systems.